Tsukuba Challenge 2013

Introduction
Tsukuba Challenge aims for autonomous mobile robots working in the real world. The goal of Tsukuba Challenge is to realize autonomous walking in 2007-2012. The second stage for Tsukuba Challenge is between 2013 and 2017. The task of Tsukuba Challenge 2013 is to find the specific person in colorful clothes and sign.
1st stage of Tsukuba Challenge

2nd stage of Tsukuba Challenge
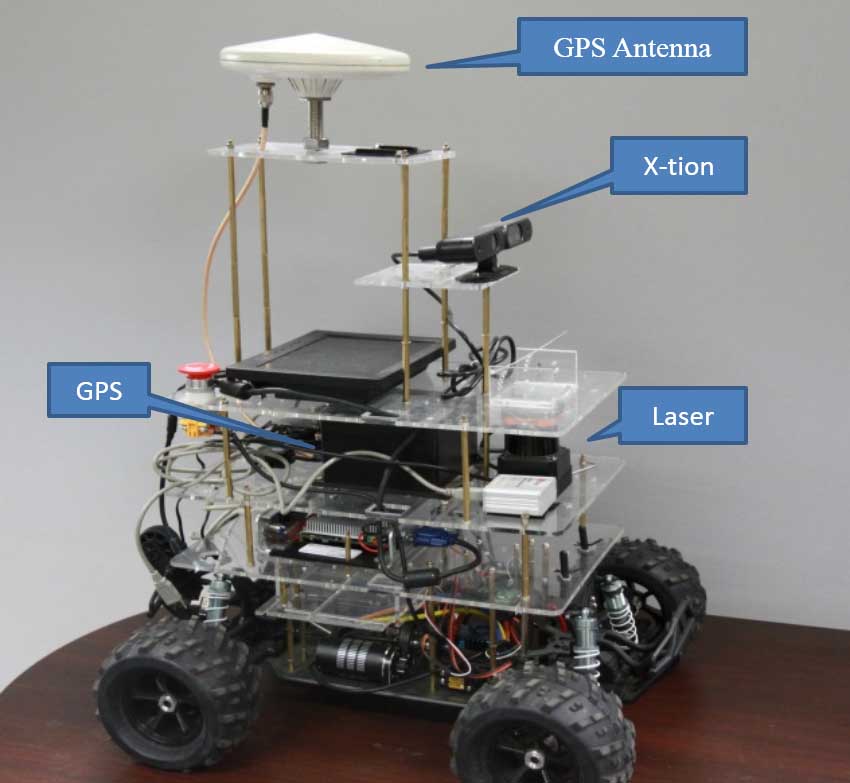
POSS-TINY
The robot we built for research is POSS-TINY. We choose the 1:8 model car as the base frame, then integrate computer, sensors, and control unit.
| Hardware | GPS/IMU | |
|---|---|---|
| Lidar | URG | |
| Motion Sensor | Asus X-tion | |
| Computer | Intel i7, 4G ram | |
| Software | Map | Laser-based 2D SLAM |
| Planning | Kelly | |
| Locate | Laser-based 2D SLAM | |
| Detection | HSV | |
| Control | PID control |
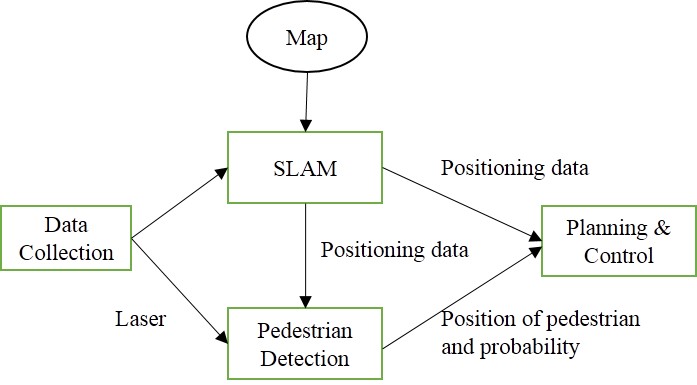
Framework

Obstacle Avoid
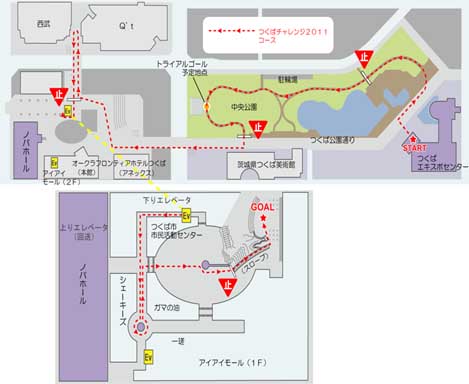
Result
Red Line means the PossTINY walked though, but the yellow line means not.

